Home
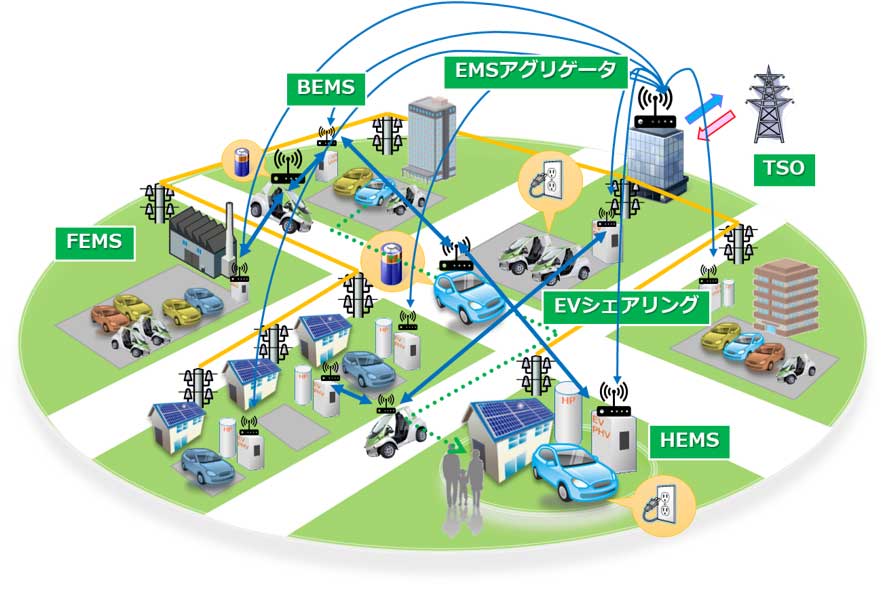
稲垣研究室では,新しい移動機構や移動に関わるインフラシステムなど,先進的なモビリティシステムの研究をしています.具体的には,実用的な多脚ロボットの実現を目指して,不整地歩行制御,運動計画,実機開発を進めています.また,EV, PHVの車載蓄電池を活用した建物や地域のエネルギー管理システムの研究を進めています.
お知らせ
- 2025/05/23 日刊工業新聞電子版に「複雑な地形も楽々移動 南山大学 多脚移動ロボ」が掲載されました。紙面には2025/05/26に掲載されました。
- 2025/03/29-30 ロボカップジュニア・ジャパン オープン 2025名古屋にて6脚ロボットをデモ出展しました。
- 2025/03/05 名古屋市工業研究所 むすぶLab.サロンにて「多脚ロボットの魅力を知ろう!」というタイトルで、講演と座談会が開催されました。
- 2024/08/07 四谷学院の「教授へのインタビュー」に稲垣教授が紹介されました.
- 2024/06/30 南山大学広報誌「南山ブレティン」の「私の研究」に稲垣教授の記事が掲載されました.
- 2024/06/03 SICE Journal of Control, Measurement, and System Integration, Vol.17, No.1に,「Multiple local controls integrated by RMPs for FCP-based hexapod walking」の論文が掲載されました.
2023年以前のお知らせはこちら
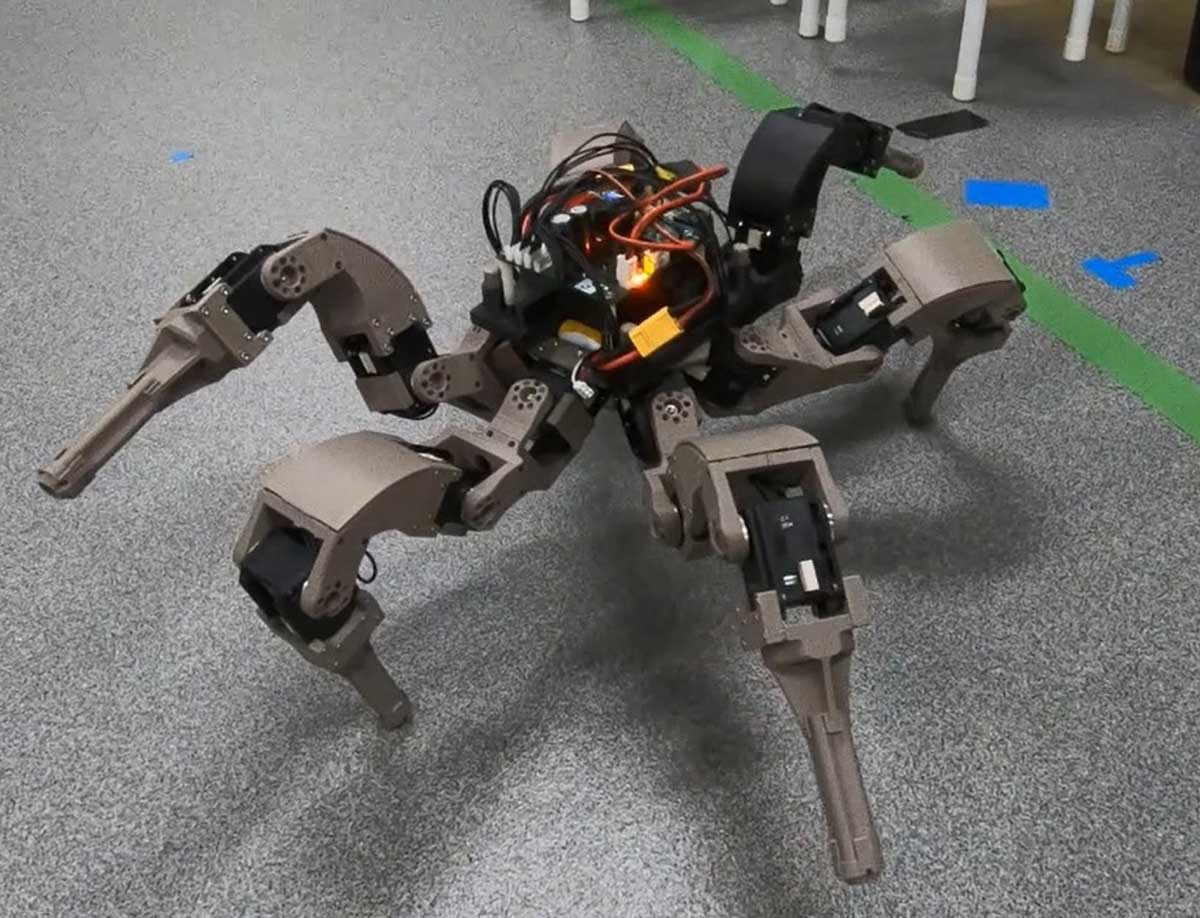
2021年から新明工業株式会社,名古屋大学,南山大学の三者間で大型6脚ロボット(SOL)の共同研究を進めています.本共同研究は,公益財団法人 科学技術交流財団 令和5年度「共同研究推進事業」に採択されています.